
| 作品:吴琮业之个人飞行器飞行摩托 | |
|---|---|
| http://jczs.sina.com.cn 2006年09月13日 16:44 新浪军事 | |
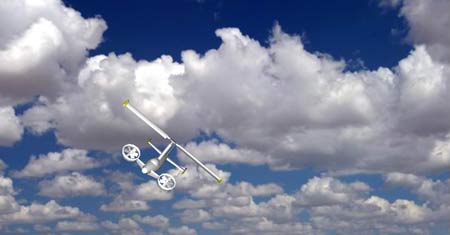 点击此处查看全部军事图片   吴琮业 个人飞行器飞行摩托 该飞行器之所以叫做“飞行摩托”,是因为它有同普通摩托车一样的优点——便捷,灵活,节能,大众化,且造价较低。 一,飞行器原理,结构及其功能 该飞行器的飞行原理及构造基本上类似于普通的自转旋翼机,但同时它有自己独特的构造,从而赋予它特殊的功能。 1,操作简单,大众化。 本人设计此飞行器的目标是尽可能的大众化,此机的市场定位即普通的小康家庭,而目前可自由飞行的飞行器中,只有自转旋翼机符合这一条件,所以此机在巡航状态同普通自转旋翼机一样,前小翼同全动平尾均处于普通模式(中间位置)。由活塞发动机驱动前小翼翼梢的涵道螺旋桨产生拉力,由机顶两片旋翼相对迎风气流的自转及前小翼和平尾产生升力。由于该飞行器大部分时间甚至完全可以以自转旋翼机的模式工作的,所以具有自转旋翼机固有的易于操作的优点。 升空后,前小翼逐渐下偏产生向前的动力,使飞机前飞,同时由于飞机相对气流水平速度的产生,前小翼及平尾上也产生升力,旋翼也同时产生维持自转的又一动力,从而进一步增大升力,来抵消涵道螺旋桨由于下偏而减少的部分升力。当旋翼翼梢的 火箭燃烧完毕时,即可将两个使用过的火箭抛掉。此时飞机已完全进入自传旋翼机状态。相对于气流的水平速度已足以推动旋翼旋转并产生足够升力了。降落时,如果旋翼起飞时翼梢各加装两颗火箭的话,则以上过程大致可以逆向实施(涵道螺旋桨甚至可以完全关闭)实现垂直降落。否则由于旋翼为完全自转,无法产生足够升力,只能实现超短距降落。飞机飞行过程中有微电子自动驾驶系统全程参与,防止危险产生(尤其是垂直起降过程中)。加上由于自传旋翼机固有的操纵容易及机动性好,失速速度低,所以此机安全性优于普通飞机,从而驾驶者不需要太多的学习及较多的飞行经验即可轻松驾驶此机。 相关专题:中国创新杯第二届未来飞行器设计大赛 |
| |||||||||||||||||||||||||||||||||||||||||||
| 舰船知识 > 我军新闻> 中国创新杯第二届未来飞行器设计大赛 > 正文 |
|
|
|